Robot arm simulation using Multi-Body Dynamics (RecurDyn) RecurDyn 1:44 2 years ago 949 Далее Скачать
Simulate and Control Robot Arm with MATLAB and Simulink Tutorial (Part I) Nguyenski LAB 15:50 3 years ago 174 943 Далее Скачать
2 DOF manipulator design and simulation | MATLAB | Simulink | Simscape | ROS | Kinematics. Md. Mhamud Hussen Sifat 28:02 1 year ago 5 369 Далее Скачать
Digital Twin model of a Robot - Mindstorms - using Multibody Dynamics - RecurDyn RecurDyn 0:39 3 years ago 405 Далее Скачать
Using Altair Inspire Multi-body Dynamics for the University Rover Rover Challenge David Stone 2:06 1 year ago 367 Далее Скачать
Robot Manipulator Simulation Using MatLab In Just 6 minutes | 3DOF robot | Direct Kinematics | Vatsal Lad 5:46 2 years ago 20 144 Далее Скачать
Simulation of a Manufacturing Robot using Multi Flexible Body Dynamics RecurDyn 0:34 12 years ago 915 Далее Скачать
RecurDyn Application - Manufacturing Robot - Multibody Dynamics Simulation RecurDyn 0:28 5 years ago 453 Далее Скачать
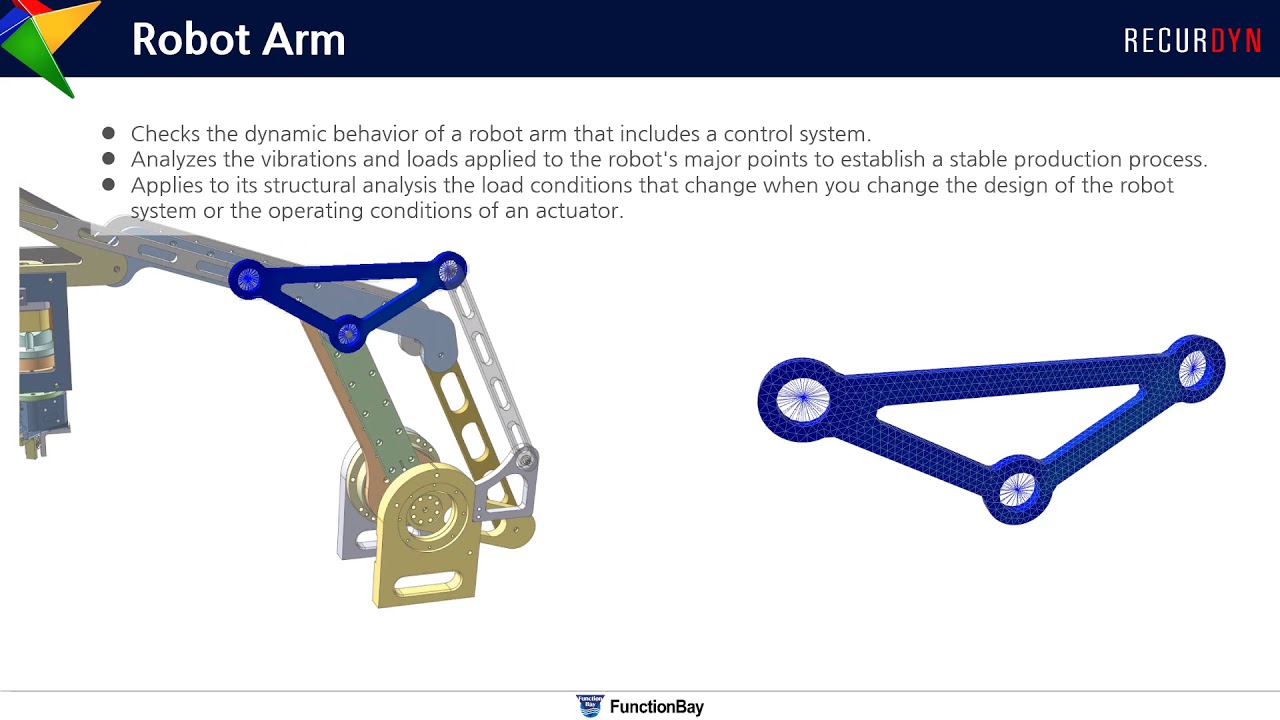
RecurDyn Application - Robot Arm - Multibody Dynamics Simulation RecurDyn 0:15 5 years ago 2 224 Далее Скачать
Dynamics of Two Degree of Freedom Robot arm with Simscape Multibody Aylik SOKHAL 0:13 3 years ago 83 Далее Скачать
Dynamics & FEA Simulation of Robot Arm using simwise4d Renaissance Technology Pvt Ltd 0:11 9 years ago 1 100 Далее Скачать